 訂閱我們的納米技術重點報道提要
訂閱我們的納米技術重點報道提要將微型機械的磁性操作擴展到非磁性材料
 納米和微尺度物體的磁操縱是一種遠程和非侵入性技術,在材料科學和生命科學中具有潛在的大量應用,例如藥物輸送。然而,該技術的一個局限性是,它隻能應用於某些具有磁響應的材料,即鐵磁性或超順磁性材料。一項新技術允許將磁性納米顆粒合並到非磁性骨架上。
納米和微尺度物體的磁操縱是一種遠程和非侵入性技術,在材料科學和生命科學中具有潛在的大量應用,例如藥物輸送。然而,該技術的一個局限性是,它隻能應用於某些具有磁響應的材料,即鐵磁性或超順磁性材料。一項新技術允許將磁性納米顆粒合並到非磁性骨架上。
納米和微尺度物體的磁操縱是一種遠程和非侵入性技術,在材料科學和生命科學中具有潛在的大量應用,例如藥物輸送。然而,該技術的一個局限性是,它隻能應用於某些具有磁響應的材料,即鐵磁性或超順磁性材料。一項新技術允許將磁性納米顆粒合並到非磁性骨架上。
 大腦啟發計算的發展麵臨的最大挑戰是,大腦過於複雜,無法簡單地在芯片上模擬。它的巨大互聯性、冗餘性、局部活動、顯著的邏輯複雜性和功能非線性使大腦成為計算傑作。該領域的許多研究人員將憶阻器視為神經形態計算的關鍵器件。特別是一種由金屬-有機分子複合物構成的非傳統憶阻器,在超低能量、高密度計算平台上顯示出巨大的前景。
大腦啟發計算的發展麵臨的最大挑戰是,大腦過於複雜,無法簡單地在芯片上模擬。它的巨大互聯性、冗餘性、局部活動、顯著的邏輯複雜性和功能非線性使大腦成為計算傑作。該領域的許多研究人員將憶阻器視為神經形態計算的關鍵器件。特別是一種由金屬-有機分子複合物構成的非傳統憶阻器,在超低能量、高密度計算平台上顯示出巨大的前景。
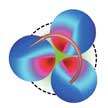
 研究人員已經展示了一種具有多種功能的微型馬達。該裝置的顯著特點是不需要合成材料,從而避免了材料合成過程中產生的能源消耗和廢物產生的問題。科學家們以微藻萊茵衣藻細胞為唯一材料,製作了由光力控製的多功能微型馬達。該係統可能特別適用於間接操縱和可控破壞生物目標。
研究人員已經展示了一種具有多種功能的微型馬達。該裝置的顯著特點是不需要合成材料,從而避免了材料合成過程中產生的能源消耗和廢物產生的問題。科學家們以微藻萊茵衣藻細胞為唯一材料,製作了由光力控製的多功能微型馬達。該係統可能特別適用於間接操縱和可控破壞生物目標。
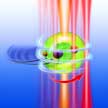
 研究人員利用光熱電效應開發了一種具有主動導航功能的新型全光學微遊泳器。這些微型遊泳者由單獨的Janus顆粒組成——聚苯乙烯珠,一半包裹著金納米顆粒——可以在39秒內定向傳送超過自身直徑22倍的物體。在不同的激光輸入下,光熱電場會觸發兩種工作狀態——遊動和旋轉。結合基於實時成像的反饋控製算法,協調遊泳者的遊泳和旋轉狀態,實現了精確的全光學導航和目標傳遞。
研究人員利用光熱電效應開發了一種具有主動導航功能的新型全光學微遊泳器。這些微型遊泳者由單獨的Janus顆粒組成——聚苯乙烯珠,一半包裹著金納米顆粒——可以在39秒內定向傳送超過自身直徑22倍的物體。在不同的激光輸入下,光熱電場會觸發兩種工作狀態——遊動和旋轉。結合基於實時成像的反饋控製算法,協調遊泳者的遊泳和旋轉狀態,實現了精確的全光學導航和目標傳遞。
 夾持器或末端執行器是與機械臂集成的基本工具,用於在各種任務中實現抓取和操作功能,從撿起和握住物體,到挖掘和分類,到移動和抓撓。工程師們開發了一種新型的智能軟執行器,基於摩擦電納米發電機(TENG),用於製造機器人智能抓手,目標是在農業、工程和醫療保健等領域的潛在應用。
夾持器或末端執行器是與機械臂集成的基本工具,用於在各種任務中實現抓取和操作功能,從撿起和握住物體,到挖掘和分類,到移動和抓撓。工程師們開發了一種新型的智能軟執行器,基於摩擦電納米發電機(TENG),用於製造機器人智能抓手,目標是在農業、工程和醫療保健等領域的潛在應用。
 海浪能是一種豐富的清潔能源。然而,經過幾十年的探索,將水波能轉化為電能用於大規模應用的高效、經濟的技術仍然缺乏。研究人員基於摩擦電效應,開發了一種新型的波能收集器——層疊結構摩擦電納米發電機(hes - teng),旨在收集巨大的藍色能量,用於大規模部署。
海浪能是一種豐富的清潔能源。然而,經過幾十年的探索,將水波能轉化為電能用於大規模應用的高效、經濟的技術仍然缺乏。研究人員基於摩擦電效應,開發了一種新型的波能收集器——層疊結構摩擦電納米發電機(hes - teng),旨在收集巨大的藍色能量,用於大規模部署。
 研究人員報告了一種液體驅動的納米顆粒運輸清潔修複方法,揭示了一種新的自修複係統,它可以保存物質,行為自主,並且易於實現。利用識別和運輸納米顆粒的功能性液滴,將停留在基板上的碎片從未損壞的區域一步轉移到基板的損壞區域。這種同時清洗和修複的方法揭示了一種新穎的自修複係統,它可以保存物質,行為自主,並且易於實現。
研究人員報告了一種液體驅動的納米顆粒運輸清潔修複方法,揭示了一種新的自修複係統,它可以保存物質,行為自主,並且易於實現。利用識別和運輸納米顆粒的功能性液滴,將停留在基板上的碎片從未損壞的區域一步轉移到基板的損壞區域。這種同時清洗和修複的方法揭示了一種新穎的自修複係統,它可以保存物質,行為自主,並且易於實現。
 微納米機械的研究已經從對基本運動行為的觀察和理解,發展到執行複雜任務的能力不斷提高。從與細菌的相互作用到基於細胞和體內醫學應用的推進。本文從微/納米機器與其他微生物或生物單位的相互作用以及微/納米機器在人體中的應用兩個方麵綜述了微/納米機器在生物係統中的應用。
微納米機械的研究已經從對基本運動行為的觀察和理解,發展到執行複雜任務的能力不斷提高。從與細菌的相互作用到基於細胞和體內醫學應用的推進。本文從微/納米機器與其他微生物或生物單位的相互作用以及微/納米機器在人體中的應用兩個方麵綜述了微/納米機器在生物係統中的應用。